Model Adaptation and Dynamic
Feature Selection
Model adaptation is a fundamental issue in tracking. Since the changes
of visual appearances jeopardize the measurement model and fail the tracker,
trackers need to be adaptive to non-stationary appearances. However, the
risk is the adaptation drift. We obtained a closed-form solution to subspace
adaptation based on novel constraints such as negative data, pair-wise
constraints, and adaptation dynamics.
Visual tracking could be treated as a parameter estimation problem of
target representation based on observations in image sequences. A richer
target representation would incur better chances of successful tracking
in cluttered and dynamic environments. However, the dimensionality of target's
state space also increases making tracking a formidable estimation problem.
The problem of tracking and integrating multiple cues is formulated in
a probabilistic framework and represented by a factorized graphical model.
Structured variational analysis of such graphical model factorizes different
modalities and suggests a co-inference process among these modalities.
Based on this theoretical analysis, we design a sequential Monte Carlo
algorithm that runs real-time at around 30Hz.
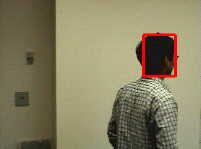
Demo Sequences
In these sequences, the target (i.e., the head) exhibits very large variations in its visual appearance in each
sequence,
as the head rotates. It is very difficult to use a fixed and complex visual appearance model to track the target in all
views, because of the large undertainty in the appearance changes. An alternative is to adapt a simpler model for
different views. Although this seems to be plausible, adaptation drift is quite common, and thus a very careful treatment
is needed (for details please see our papers).
Publication:
-
Ying Wu and Thomas S. Huang, "Robust Visual Tracking by Integrating
Multiple Cues Based on Co-Inference Learning", Int'l Journal Computer
Vision (IJCV), Vol.58, No. 1, June 2004. [PDF]
-
Ming Yang and Ying Wu, "Tracking non-stationary appearances and dynamic
feature selection", in Proc. IEEE Conf. on Computer Vision and Pattern
Recognition (CVPR'05), San Diego, CA, June 20-26, 2005. [PDF]
-
Ying Wu and Thomas S. Huang, "A Co-inference Approach to Robust Visual
Tracking", in Proc. IEEE Int'l Conf. on Computer Vision (ICCV'01),
Vol.II, pp.26-33, Vancouver, Canada, July, 2001. [PDF]
-
Ying Wu, Thomas S. Huang, "Color Tracking by Transductive Learning",
in Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR'2000),
Vol.I, pp. 133-138, Hilton Head Island, SC, June, 2000. [PDF]
Return to Tracking Research
Updated 7/2006. Copyright © 2001-2006 Ying Wu